Distortion Model
In RealityCapture you can select a different mathematical model which is used for modelling lens distortion.
Even though it might not be directly visible, some distortion always applies.
You can define which model you prefer to be used in the ALIGNMENT Settings.
Select ALIGNMENT tab and click Settings button to open
the Alignment Settings panel. You can define the distortion model under Advanced settings.
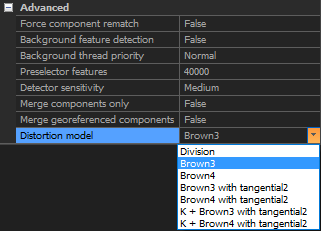
Supported Lens Distortion Models:
- Division
reliably covers simple distortions but works very well also for fish-eyes optics (for example GoPro).
The distortion is modelled by means of a single-parameter division model.
- Brown3
Is the most popular distortion model worldwide.
It works for optics with less than 180°.
This is a polynomial model of radial distortion with 3 modelling parameters. It is used as a default.
- Brown4
is able to cover different distortion in the middle and borders of an image.
This is also a polynomial model of radial distortion but with 4 coefficients.
- Brown3 with tangential2 / Brown4 with tangential2
extend Brown3/Brown4 with a tangential distortion, which can compensate offset of lenses.
Majority of current optics has negligibly small tangential distortion.
- K + Brown3 with tangential2 / K + Brown4 with tangential2
These models add to the Brown model a possibility to optimize the whole camera calibration, including Skew and Aspect ratio.
If K + ... is not used, RC by default assumes a zero skew and aspect ratio as 1.
TIP: You can switch between models, e.g., starting with a simpler Division model first,
and later change it to Brown and click Align Images (F6) to optimize data.
See also:
- Learn more about camera models on Wikipedia click here