Camera Priors
Priors are data (camera/scene information) known before alignation. They may be used to influence quality of alignation. They can be fixed, approximate or completely unknown.
Pose, calibration and lens distortion priors can all be set when selecting an image or more of them in the selection panel:
Prior Pose
The following parameters define what we know about a certain camera position:
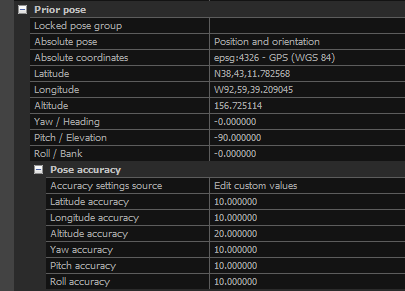
- Locked pose group If you type in a positive integer, a group will be set. Leave this field blank or type in a negative integer in order to ungroup poses.
- Relative pose
Unknown - there is a need to calculate it.
Draft - you have a camera oriented but wish to change its position.
Exact - the position is fixed and is not changed (for example a full-body scanner). - Absolute pose
Unknown - same as above.
Position - camera position is known up to some precision, RC will search for the position which is as close as possible; the camera orientation can be different.
Position and orientation - both rough position and orientation of a camera are known.
Locked - no changes in camera position allowed. - Absolute coordinates Defines the coordinate system in which the camera is located.
- Pose accuracy
Defines the accuracy of the camera location. It can be set to the global settings or to custom values.
If the Accuracy settings source is set to "Global camera prior settings", the values set in the Alignment settings will be used.
When Accuracy settings source is set to "Edit custom values", it is possible to manually change the accuracies of the selected input(s).
Prior Calibration
The following parameters provide you with information on internal camera calibration (focal point, projection center and so on):
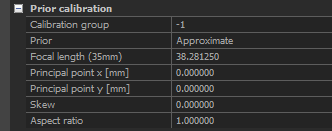
- Calibration group All images with the same number (other than -1) will share the same calibration parameters after images are aligned.
Unknown - RC will calculate them.
Approximate - starting values are known and RC should not deviate from them too much.
Fixed - use all user-defined parameters.- Focal length (35mm) in millimeters.
- Principal point x [mm] A position of the center of projection on the x axis in millimeters.
- Principal point y [mm] The position of the center of projection on the y axis in millimeters.
- Skew of an image plane.
- Aspect ratio of a pixel.
Prior Lens Distortion
Define information about your optics:
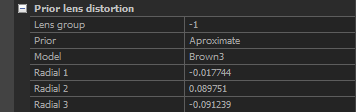
- Lens group All images with the same number (other than -1) will share the same lens parameters after images are aligned.
- Prior
Unknown - use for images with high lens distortion / fish-eye if lens priors are not known.
Approximate - starting values are known and RC should not deviate from them too much.
Fixed - use user-defined parameters. - Model Define a distortion model which should be used to model the lens distortion.
- Radial 1/2/3/4 ... are radial distortion coefficients.
- Tangential 1/2 ... are tangential distortion coefficients.
By default, the lens distortion model is set to "No lens distortion" with prior set to "Approximate". This means that RC tries to find a solution where lens distortion is as close to zero as possible. This is not realistic if images suffer from a visible lens aberration. In such case, you should either define proper distortion coefficients or set the lens prior to "Unknown".